CoExist 2
Pilotprojektet leddes av Volvo Cars med Trafikkontoret som behovsägare och Berge och HiQ som samarbetspartners.
Simulating how will we share spaces with autonomous vehicles
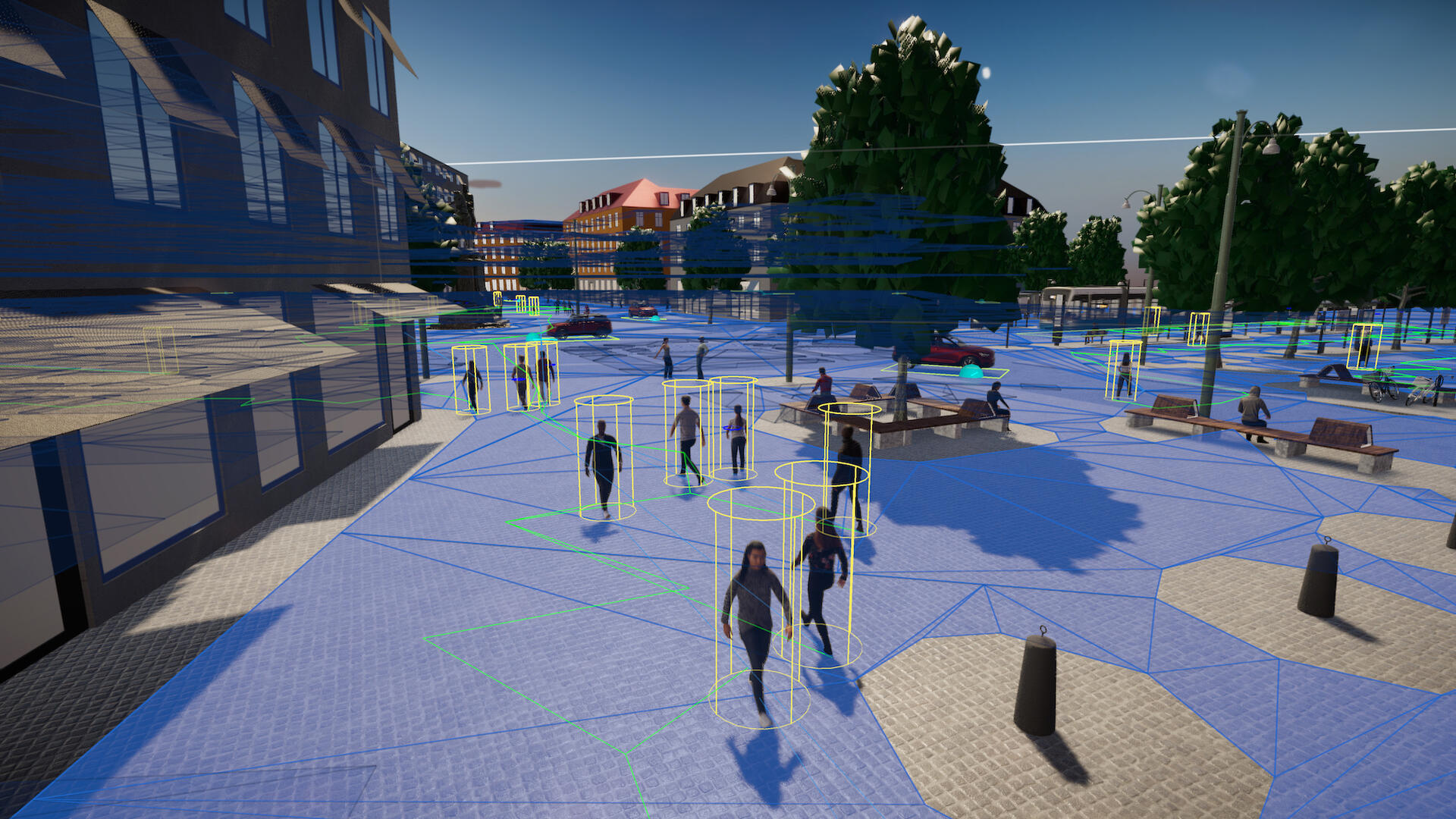
In the future autonomous vehicles will have to interact with their surroundings in a separate way than manually driven vehicles. By using the digital twin, we can explore the interaction between Humans (avatars), Machines (vehicles) and Infrastructure.
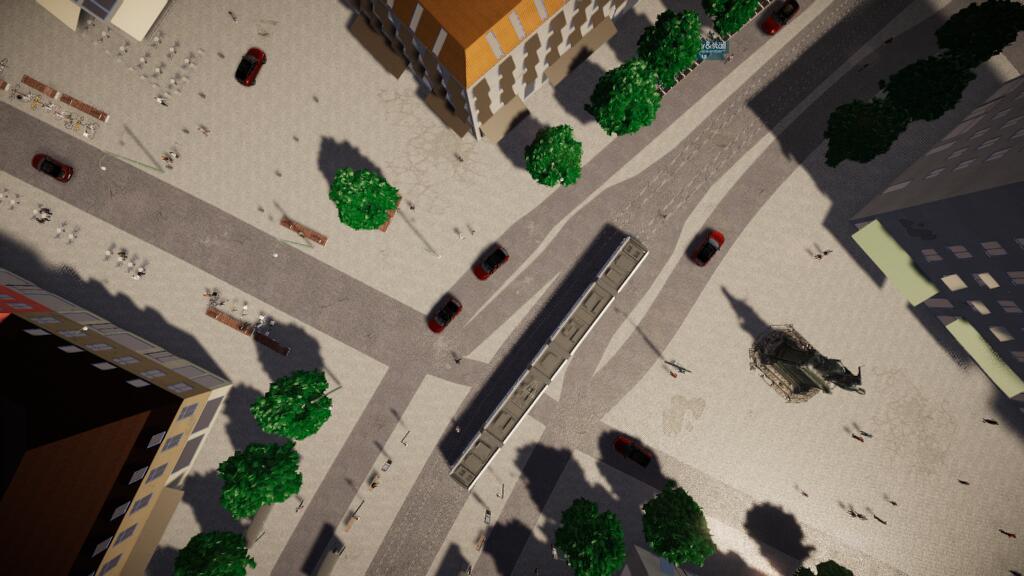
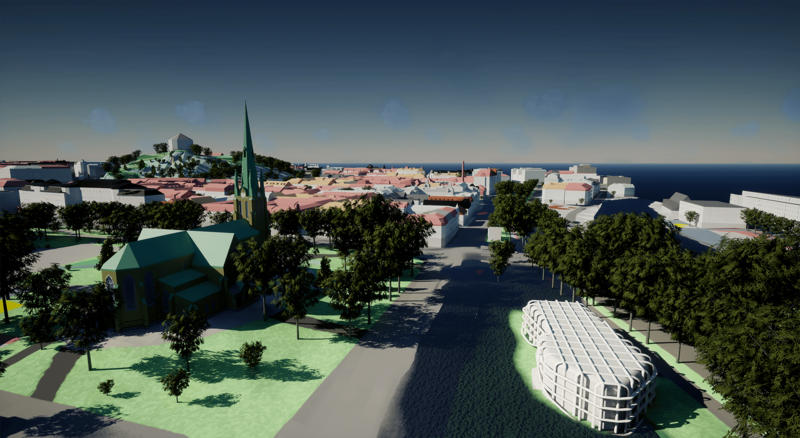
The pilot CoExist2 has explored this challenge in a so-called shared space in central Gothenburg. The pilot also acts as a tool for discussion both within the public and private sector. Findings were continuously discussed with the design of the testbed and other pilots. We must learn how to design an infrastructure that supports a safe and sustainable introduction of autonomous vehicles.
Challenges
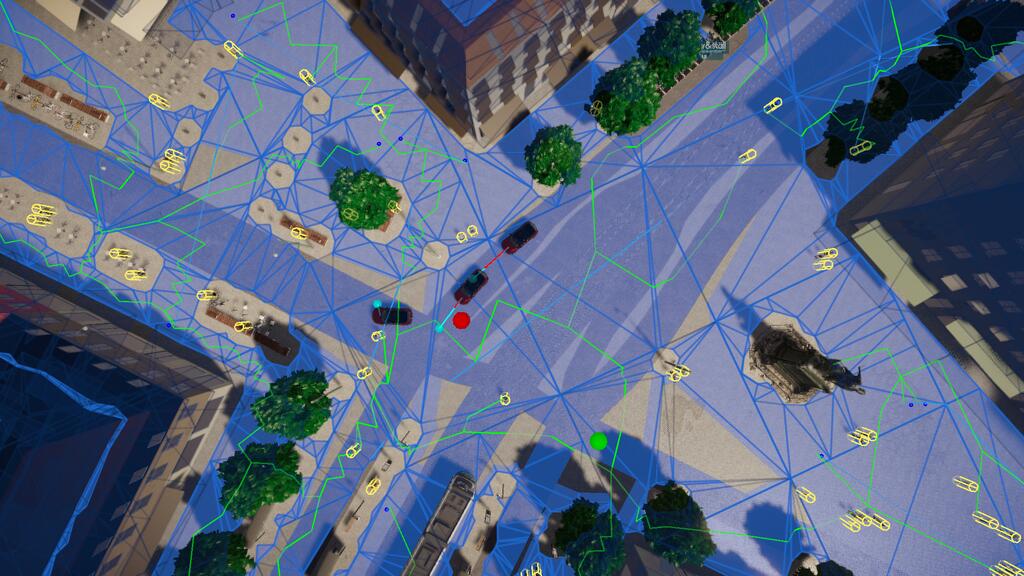
A traffic situation is affected by different parameters: how they appear, what happens in them, how they affect an area, what are the consequences, what can be done and how can it be prevented etc. Because of this, the goal is to get a visual and realistic representation of the interactions on a shared space between autonomous vehicles, bicycles, and pedestrians. This is important so we can get a better visual understanding of the different situations, having the ability to simulate different traffic situations and a way to communicate the result in an easy, visual way to stakeholders.
Solution
For the exemplary implementation of the defined use cases in this pilot we made use of game technology to create a real-time 3D environment with several simulation layers in it. In this case the software Unity 3D was used, which is a cross-platform game engine made to develop video games. Nowadays it is utilized increasingly for industrial use cases like simulation or marketing.Having a digital twin of the city opens a lot of possibilities to understand, simulate and communicate different challenges or situations in a city. The ability for cars, trams, and pedestrians to move in the scene was added according to pre-set restrictions and rules. For cars and trams we also included spatial audio, meaning the sound increased when closer to the object and decreased when moving away from object. For the scene itself we added tools so we could control the environment, such as the ability to choose day or night, number of cars and number of pedestrians.
Results
We were able to achieve a fully functional 3D scene/model with visualized vehicles and pedestrians interacting in a fully autonomous way. We also had control of time-of-day, car movement and pedestrian movement, while keeping the real-time data optimized. Furthermore audio recordings from the physical location was implemented with spatial audio in order to add even more realism to the simulation.


There are no limitations
The importance of intelligent digital avatars in simulation environments is major finding. When having the requirement of simulating the possible real world in a digital twin, highly advanced avatars are necessary. The current implementation has advanced pathfinding algorithms but does not consider e.g., different personas, ages, cultural backgrounds, or personalities which all have an influence on behavior. This is a very intresting and expandning field to explore.
Så här ser det ut
Här kan du titta på en prototyp från pilotprojektet.
Pilotledarna
Det är vi som ansvarat för detta pilotprojekt.

Daniel Jungegård

Mikael Ivari
Andra projekt vi genomfört
Här hittar du de andra pilotprojekten.

Centralenområdet
Skyfall
Social hållbarhet i stadsutveckling

Stadens Siluett

Vad vill du testa?
Virtual Gothenburg Lab är under utveckling och öppnar nu upp för tester kopplade till Göteborgs stads digitala tvilling. Finns det något som Du har behov av att testa? Hör av dig till oss!
